|
|
|
Site Navigation
Projects & Information
»General Information»Wind turbine Projects »The F&P Smartdrive »Electronic projects »Microcontroller projects »Miscellaneous Kits & Parts
»Basicly Natural Pty Ltd»PVC & Aluminium blades »Scale model farm windmills »Price Watch Discussion Forums
Handy Links
»Wind»Solar »Electric Vehicles »Electronics »Micro Controllers »General Interrest About TheBackShed Getting Started Privacy Policy |
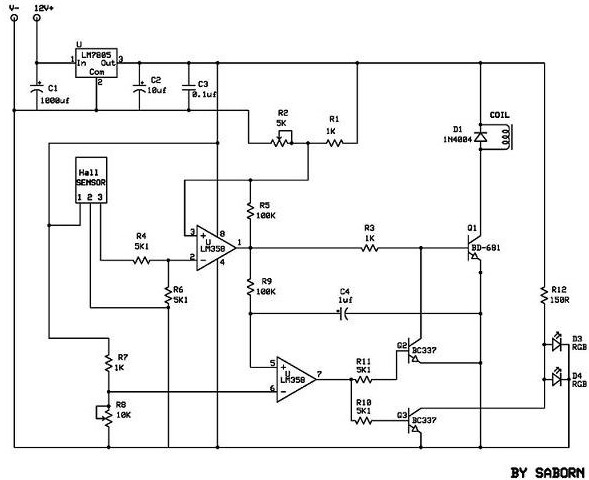
Originally I tried to use a Picaxe to read the hall sensor and do the switching of the coil via a transistor, but the picaxe was too slow. I then went to using a LM-358 Opamp with good results. The Opamp circuit is very basic and simple. What I noticed was when the magnet is levitating the circuit only draws about 50-150mA, depending on the object weight, but when the magnet is removed or is knocked out of levitation, the coil is switched hard full on. This causes the 5 volt regulator to run very hot or overheat. The circuit has now been redesigned to use the second half of the dual opamp to switch the coil off in the absence of the magnet.
The whole circuit including the coil operates off 5 volts, and a LM-7805 voltage regulator is used to supply this, so the maximum current needs to be kept below about 0.5 amps. The sensor output is connected to the inverting input of the opamp (opamp-1), and the non inverting input of opamp-1 is connected to a pot set as a voltage divider, the pot is used to trim in the balance point of levitation for different size magnets or object weights attached to the magnet. Opamp-1 output is connected to base pin of a BD-681 transistor via a 1K resistor, the BD-681 is used to do the coil switching, almost any NPN transistor or mosfet could be used that has a 1 amp or greater rating. The second half of the opamp (opamp-2) is used to monitor the output frequency to the transistor, this is done by a 100K resistor off opamp-1 output into a 1uf cap, effectively creating a analogue voltage which supplies the non inverting input of opamp-2. Opamp-2 inverting input is supplied with a voltage from a trimpot set as a voltage divider. A second BC-337 transistor is also connected to the opamp-2 output that controls the leds by shorting out the limiting resistor to the leds to switch them off. To set the coil switch off point it is as simple as a 1 time adjustment to the trimpot till the led just turns off. This is really a fun project to build and will fascinate many people of how it works with an object levitating in mid air. For the teachers on this forum I recommend you build one as it will be of great interest to your students. Recently my devices were taken to a school display for the opening of a new facility, which had several kits and products on display for teaching purposes, from the feed back I received, it was a big hit with the interest of the teachers, to the point they bypassed much of the other items on display and gathered to observe an object in levitation. Now the circuit bugs have been worked out it is a very simple circuit to construct with only a few basic components.
|