
|
|
Forum Index : Microcontroller and PC projects : Hmmm, need a bit more testing but...
| Author | Message | ||||
| PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1968 |
Geoff, Pete, Gerry... We might be looking at something never with a Basic interpreter before. Let's see over the next few days. If it works out, I be makin noises bout dis |
||||
| PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1968 |
Wow was my message hijacked? Who talks like that. |
||||
| stanleyella Guru Joined: 25/06/2022 Location: United KingdomPosts: 2807 |
usb seems interesting, where will it go? |
||||
| PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1968 |
I seriously have some things going on with the H71. Could be huge in machine control 😁 |
||||
| IanT Senior Member Joined: 29/11/2016 Location: United KingdomPosts: 130 |
"Could be huge in machine control" I'd like an Off-Line GRBL Controller for my Birthday please PR :-) IanT |
||||
| PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1968 |
Meh, don't do stepper stuff, only proper motors  |
||||
| Mixtel90 Guru Joined: 05/10/2019 Location: United KingdomPosts: 8913 |
Nothing less than those weedy 30kW jobs, I hope. ;) Mick Zilog Inside! nascom.info for Nascom & Gemini Preliminary MMBasic docs & my PCB designs |
||||
| IanT Senior Member Joined: 29/11/2016 Location: United KingdomPosts: 130 |
No Stepper Motor control required PR. Offline Controllers just feed G-Code (basically text generated by the CAM system) to the GRBL controller (on the CNC router) instead of needing a 'connected' PC running UGCS (Universal G-code Sender) or something similar like Candle. They (G-Code Senders) also allow you to manually 'jog' X/Y/Z machine movements (to zero out 'Z' axis for instance) and usually have lots of other graphical bells and whistles... I've been thinking about something simpler than UGCS, to give 'jog' functions and perhaps some simple G-Code 'Macro' operations whilst displaying a DRO-like display on screen. Should be possible to build a standalone solution using MMB, maybe with a PicoMite VGA. It's on my wishlist but unlikely to happen unless I find something to give me a big leg-up time-wise (remembering I'm not exactly a programming expert). However, I'm still looking forward to seeing what you might have in store for us! IanT Edited 2024-02-09 21:13 by IanT |
||||
| IanT Senior Member Joined: 29/11/2016 Location: United KingdomPosts: 130 |
I only have a very weedy 300W I'm afraid Mick IanT |
||||
| PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1968 |
I was an early adopter of closed-loop AC Vector (FOC) drives, mainly 100HP and 40HP. Big-enough servos weren't available. Low inertia Reliance motors. Wonderful things to work with  Always dual-loop feedback, encoder on the back of the motor and another on the actual load.  |
||||
| PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1968 |
Have you ever checked-out GRBLgru? I was chatting with the author. Super-nice guy. Offered to create any model I needed. |
||||
| PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1968 |
Well I wasn't anticipating (or needing) such fantastic performance. This has to be a world's first  High performance closed-loop Position and Velocity control under interpreted Basic  ArmMite H7 $5 LMD18200 H-Bridge module DC Motor with HEDS encoder. 500 line = 2000 quadrature counts/rev LS7366 SPI Quadrature decoder/counter ArmMite Basic Full Proportional-Integral-Derivative (PID) filter Integral limit Velocity Feed-Forward Acceleration Feed-Forward Torque Limiting Output Offset (to compensate for external influences, such as gravity) PID Loop rate: Currently 1ms (industry standard) but could easily handle 500us No "Sync" that we have in PicoMite Basic and so I profiled (surprisingly good):  Velocity regulation is amazing, considering the simple H-Bridge: Command Velocity: 300,000 quad cts/sec = 150 revs/sec (2000 cts/rev) = 9000RPM 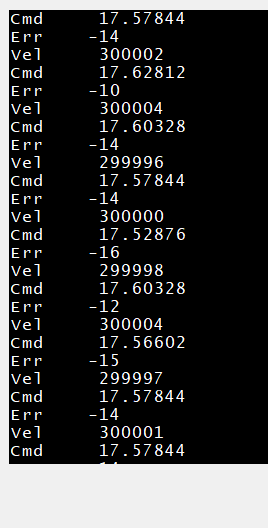 Cmd: The PWM%. This is "Antiphase PWM", meaning that 50% duty-cycle is zero output to the motor. Err: Command_Position - Actual_Position. Velocity Feed-Forward (VFF) applied. Vel: Actual motor velocity in quadrature counts/sec. 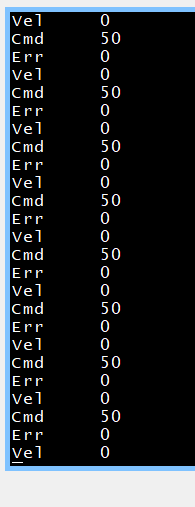 Steady state maintains zero position error. Force the motor shaft out of position or turn it with motor power (32V DC) off and it will jump right back. Now to implement Trapezoidal and S-curve velocity profiling, master/slave gearing and interpolation with other units This thing has all kinds of possibilities. |
||||
| Volhout Guru Joined: 05/03/2018 Location: NetherlandsPosts: 5953 |
What frequency do you run the PWM? Does it run in sync with the main pid loop, or free running? Using the inertia in the motor as a low pass filter. You can use SETTICK to creat an interrupt driven accurate loop. Volhout Edited 2024-02-16 17:10 by Volhout PicomiteVGA PETSCII ROBOTS |
||||
| Volhout Guru Joined: 05/03/2018 Location: NetherlandsPosts: 5953 |
Hi PhenixRising, You mentioned the word FOC. Maybe we can chat a bit about something on my horizon. Do you have experience with FOC on a hysteresis motor. What I am looking for is some experience how wide the FOC window is.. The Hysteresis motor typically is driven by the frequency needed to achieve the required rpm (like the 1960's record players drive by 50Hz). Due to the inertia they spin up slowly forced by the edi current losses. But once the reach the rpm matching the frequncy, they behave like BLDC motors (or permanent magnet AC motors). And these can be controlled with FOC very good. I am interested how wide the rpm window is that they can be controlled using FOC. IS that 1% of rpm, or 0.1%, and can it be influenced by bandpass filters on the current channels.? Looking out for your response. Volhout PicomiteVGA PETSCII ROBOTS |
||||
| PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1968 |
Hi Volhout, The PWM is running at 18KHz and runs in the loop. However, it is only temporary for desktop testing/development. The DACs will take-over, eventually, as I drive a motor-command of +/- 10V. The H7 has 12bit DACS which is just perfect I have to say that I am quite impressed with this crude setup, totally stable. I have to grab the motor shaft to know if the loop is running I started-out with SETTICK but it's limited to a resolution of 1ms. This 1KHz is more than adequate for the application (the consensus is 10 X the bandwidth of the machine) but my code execution time is currently < 200us. I have a bit more to add but I don't see it going past 300us. So now I have the option of running the loop at 2KHz. |
||||
| PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1968 |
Actually not a fan of FOC. Only used them out of necessity. I much prefer the simplicity of hall-effect commutation. The DSPs and Park-Clarke transforms are a heck of an achievement but there is a tuning process required and for this, the motor must be decoupled from the load. This is one thing in the lab but in the event of a drive-replacement in the field and the 40HP motor is 5m above the floor....  |
||||
| The Back Shed's forum code is written, and hosted, in Australia. | © JAQ Software 2026 |
