Notice. New forum software under development. It's going to miss a few functions and look a bit ugly for a while, but I'm working on it full time now as the old forum was too unstable. Couple days, all good. If you notice any issues, please contact me.
PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1964
Posted: 04:08pm 17 Aug 2024
Copy link to clipboard
Print this post
Allie
Please post the encoder details. Pretty sure we need to level shift from 5v and there's a possibility that we have differential signals. All easy to accommodate
allie Regular Member Joined: 06/10/2018 Location: CanadaPosts: 88
Posted: 04:23pm 17 Aug 2024
Copy link to clipboard
Print this post
My board is a Raspberry PI PICO (2020) with the CPU RP2-B1 21/16 PVRW 57 . 00 chip I don't know what firmware it came with but can I reload it with the MMBASIC firmware. It has a BOOT SEL button on the board. It came from WAVESHARE and it's a basic kit with breadboard, wires, switches, leds, and other parts.
Regards Allie
Mixtel90 Guru Joined: 05/10/2019 Location: United KingdomPosts: 8913
Posted: 04:56pm 17 Aug 2024
Copy link to clipboard
Print this post
That sounds like a normal Pico. Can you provide a link to the board and I'll let you know?
The RP2040 doesn't actually have that number on the chip, so it can be a little confusing. :) What you say sounds right though.
Rickard5 Guru Joined: 31/03/2022 Location: United StatesPosts: 463
Posted: 09:15pm 17 Aug 2024
Copy link to clipboard
Print this post
Sorry it took so long to get back but that very close to What I'm Trying to build, but I'm trying to build something Modular that I can build up like Legos for several different Machines like my surface Grinder or an INDEXER ON MY DRILL PRESS FOR ENGINE TURNING (JEWELING)I may be Vulgar, but , while I'm poor, I'm Industrious, Honest, and trustworthy! I Know my Place
allie Regular Member Joined: 06/10/2018 Location: CanadaPosts: 88
Posted: 09:52pm 18 Aug 2024
Copy link to clipboard
Print this post
I'm not sure how to do a link yet, I'll have to try and learn how. There is the same one that I have in a kit on Amazon.ca called Freenove Ultimate Starter Kit for Raspberry Pi Pico. When scrolled over the picture it enlarged big enough to see the markings on the CPU and its the same as the board I have. I tried to change the firmware that came on the one I have. I downloaded the MMBASIC firmware from Geoff's site to put on the Pico but I couldn't get it to open on my windows laptop. I checked the internet, and I think I need to download a program to open the uf2 file.
Regards Allie
PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1964
Posted: 10:03pm 18 Aug 2024
Copy link to clipboard
Print this post
Allie
With the Pico disconnected, press and hold the reset button while you connect the Pico. The Pico will appear as a new drive in Windows. Copy and paste the uf2 file to the "new drive". The firmware will load automagically
allie Regular Member Joined: 06/10/2018 Location: CanadaPosts: 88
Posted: 10:29pm 18 Aug 2024
Copy link to clipboard
Print this post
Yes I'll have to level shift. I have one that shifts from 5v to 3.3 as long as it can handle the speed.
Hope this helps Regards Allie
allie Regular Member Joined: 06/10/2018 Location: CanadaPosts: 88
Posted: 03:02am 19 Aug 2024
Copy link to clipboard
Print this post
I finally got the firmware for MMBASIC loaded in the Pi Pico. It seems to work good with Teraterm terminal. I guess now I can refer to it as a Picomite.
The Pico CPU is the 2040 chip with only two state machines. Will I need the other CPU with three state machines for the 3 AXIS on the mill to count the encoder pulses.
Regards Allie
PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1964
Posted: 05:13am 19 Aug 2024
Copy link to clipboard
Print this post
This code will handle 4 encoders on the RP2040 Picomite
PhenixRising Guru Joined: 07/11/2023 Location: United KingdomPosts: 1964
Posted: 06:52am 19 Aug 2024
Copy link to clipboard
Print this post
Level shifting:
As we only need uni-direction, I use the 74HC4050 device.
phil99 Guru Joined: 11/02/2018 Location: AustraliaPosts: 3294
Posted: 08:28am 19 Aug 2024
Copy link to clipboard
Print this post
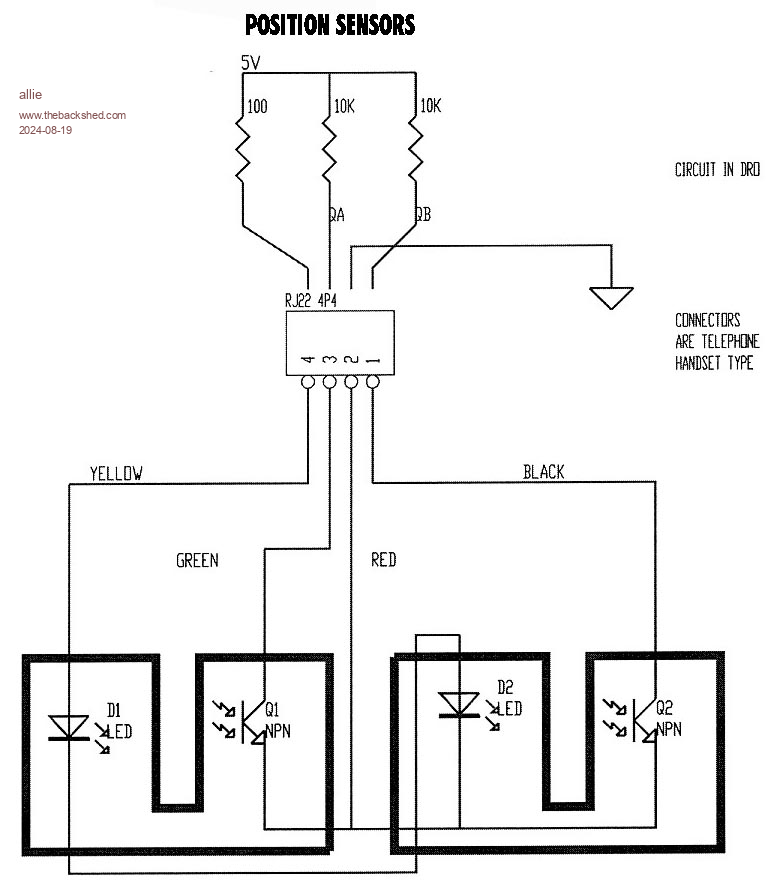
The "Position Sensors" circuit above will work if powered from 3.3V, then you don't need a level shifter. If the LED current is too low at 3.3V reduce the 100Ω resistor to 68Ω or 51Ω.
Plan "B" would be to continue to have the 100Ω connected to 5V but have the 2 x 10kΩ connected to 3.3V.
allie Regular Member Joined: 06/10/2018 Location: CanadaPosts: 88
Posted: 07:07pm 19 Aug 2024
Copy link to clipboard
Print this post
Thanks for the info. Do I type this into the Picomite with the teraterm terminal.
Regards Allie
allie Regular Member Joined: 06/10/2018 Location: CanadaPosts: 88
Posted: 07:11pm 19 Aug 2024
Copy link to clipboard
Print this post
Thanks for the info I'll use plan "B".
Regards Allie
Mixtel90 Guru Joined: 05/10/2019 Location: United KingdomPosts: 8913
Posted: 07:27pm 19 Aug 2024
Copy link to clipboard
Print this post
Not sure which terminal you use, but you can do this using Tera Term.
new 'to clear the memory autosave
now copy the text onto the clipboard put the cursor into the Tera Term window and use Paste The text is "typed" into the Pico
Press Ctrl Z
you will get the message "Saved nnnn bytes"
Your program is now loaded.
If there are missing bits or it's mangled then you need to add delays into Tera Term.Mick